.png)

上海图书馆东馆智慧场景案例介绍:机器人服务
2023年02期【行业交流】
供稿:刘云(上海阿法迪)
机器人技术在图书馆领域逐渐普及,越来越多的机器人服务走入图书馆。上海图书馆东馆通过应用多种智慧化手段来满足智慧空间、智慧服务与智慧业务的需求,机器人便是其中手段之一。上图东馆中的“机器人馆员”,有的提供导引、借还、咨询,以更好地满足读者个性化阅读需求;有的忙碌在室外的汽车穿梭还书亭,自动完成书籍向室内的搬运;还有的定时进行图书的清点,以实现图书资源的智能管理与服务。本文与大家分享上图东馆智能咨询导览借还机器人、搬运机器人及盘点机器人的智慧服务场景及功能。
1.“智能咨询导览借还机器人”功能体验
智能咨询导览借还机器人是一款集多功能于一体的机器人,可以根据需求开启不同功能模式。目前,上海图书馆东馆一楼、三楼各配备了6位机器人“馆员”,为读者提供图书借阅、查询、讲解,室内导航、智能对话、巡逻广播等服务。

智能对话
可向机器人进行语音咨询,包括:
1) 闲聊:日常性问题,例如问候、天气、时间等话题;
2) 图书馆知识库:图书馆的相关的问题,例如几点开门,怎么办证,读者证有效期等;
3) 指定服务功能:机器人指定的服务功能,例如我要借书,带我去卫生间,图书推荐等。


借书还书


读者可以和机器人说:“我要借书”,或者在菜单界面点击“借书”。机器人就会转过身来。除了支持识别“一卡通”读者证,还支持二维码电子证扫码借书。将要借的图书放在指定位置,机器人可以快速识别到图书信息,成功借书。

读者和机器人说:“我要还书”,或者在菜单界面点击“还书”。机器人就会转过身来。将要还的图书放在指定位置,识别图书信息,确认后放入“还书口”即可。

送书到位,预约领座
提供“送书到点”服务,读者通过机器人借书,它将自动检测该读者证信息是否有已预约的座位,读者可以根据需要,将书本放进机器人的肚子内,由它帮读者和搬运书籍并引导读者前往座位。

室内导航
读者和机器人说:“带我去(位置名)”,或者在菜单界面点击“室内导航”。

路线展览
读者和机器人说:“带我参观图书馆”,或者在菜单界面点击“路线展览”。

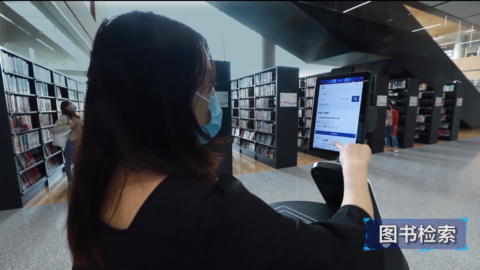
图书检索
在菜单界面点击“图书检索”按钮后进入界面,界面跳转馆藏查询入口。
图书推荐
读者对机器人说 “推荐图书”,或在菜单界面点击“图书推荐”按钮后进入界面,界面跳转图书推荐页,分类推荐,点击图书显示馆藏信息查询二维码。

图书讲解
读者对机器人说 “帮我介绍下这本书”,或在菜单界面点击“图书讲解”按钮后进入界面;机器人转身并提醒读者把需要讲解的书籍放置在平台上,RFID识别后,根据后台返回信息,跳转不同界面:1. 讲解书籍本地有视频资源,界面直接播放讲解视频;2. 讲解书籍无本地资源,界面跳转至馆藏查询详情界面。
活动中心
读者对机器人说 “最近有什么活动”。或在菜单界面点击“活动中心”按钮后进入界面,界面跳转馆内活动页面。
服务指南
在菜单界面点击“服务指南”按钮后进入界面,界面跳转馆内服务指南页面。
巡逻广播
登录管理界面,该功能机器人按照编辑的线路行走,同时播报语音,路线循环次数和播报内容均可编辑。


服务配置
以下三个功能为管理员设置功能。
路线配置:登录管理界面,供馆员配置路线展览功能中的参观路线,可增减路线上的点位,或者更改路线上的点位顺序。

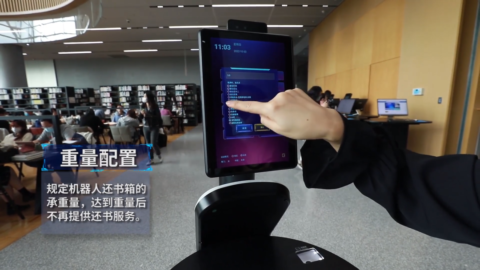
重量配置:登录管理界面,供馆员配置还书箱的箱满阈值,范围 0~30kg,同时设定箱满时机器人前往清空书箱的点 位,当还书箱的重量达到设定阈值时,机器人会自动前往清箱的点位。
服务点设置:该功能用于配置机器人在导航和巡逻任务结束后是否需要返回服务点,以及服务点位置的统一设定,另外可设定机器人工作时间,工作时间分为上班时间和下班时间,可多段设置。
上班时间 —— 机器人在充电状态下且电量达到70%以上,上班时间段内会自动前往所选定的服务点位置,其它情况不动作。
下班时间 —— 在所设上班时间外即为下班时间,下班时间内机器人会自动回去充电。

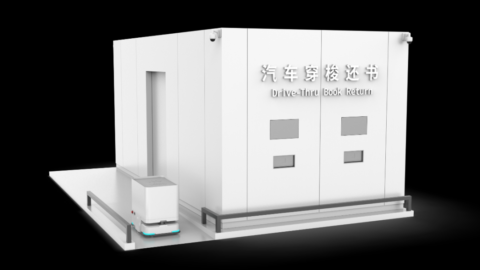
2.“搬运机器人”功能介绍
上图东馆汽车穿梭还书亭在面向馆内车道和馆外人行道的方向,分别各开放2个还书口,对应支持24小时不停车还书和人行自助还书;4个还书口设备相同,功能一致,仅支持还书功能,还书口放入书籍通过皮带输送至亭内还书箱。皮带可向还书口外延伸,伸出距离可分别针对不停车还书和人行自助还书进行设置,方便读者操作。还书亭内的还书箱,在装满书后,由搬运机器人搬运至馆内,更具智能化。

搬运机器人具有如下功能:
声光提示功能
搬运机器人行驶动作有对应声音及显示灯进行提前警示。
一键呼叫
搬运机器人运行至指定送书点或在空闲状态下可一键叫回接书口(无任务订单下可操作)。
急停功能
搬运机器人开机状态四周有安全气囊碰撞后触发(可远程恢复急停和手动恢复)。
障碍物识别
搬运机器人运行状态路线出现之障碍物后进行停止等待室外障碍物移动后继续行驶(短信提醒)。
短信报警功能
急停、前方障碍物、搬运机器人离开还书口、搬运机器人已到指定送书口等状态触发短信报警。
自主遥控小车功能
需要把原订单任务清空跳转至搬运机器人独立界面可操作控制搬运机器人(多个步骤解除限制后可操作)。
自动充电功能
可自定义时间段进行操作搬运机器人进场充电。
智能化平台状态
显示搬运机器人当前接书口剩余可还书量、运行状态是否异常。
3.“盘点机器人”功能介绍
智能盘点机器人融合物联网感知技术、人工智能技术、计算机视觉以及移动机器人技术等多项技术,根据图书馆现场环境进行自适应建图,适用于各类图书馆场景,自动读取图书RFID标签,实现全自动化图书盘点与定位。

盘点机器人包含了如下功能:
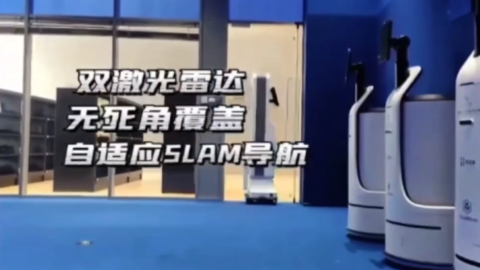
自主导航
自适应导航。前后激光雷达保障360度无死角测距扫描,采用先进的时差测距方式(TOF),增加了激光雷达在复杂场景下的测距可靠性与精度。
双升降杆模块
独立升降系统,适用于不同规格的书架,根据书架高度,自动化调整。

自主盘点
到达预设定盘点时间,机器人自动进入盘点模式进行盘点。读取图书RFID标签,实现全自动化图书盘点与定位。具备计算机视觉盘点功能,读取书脊书名并进行全库书名匹配,辅助RFID进行图书盘点与定位。

智能避障
对行进过程中遇到的地面障碍物(桌椅、沙发、人等)进行检测与避免碰撞。

自动充电
能够自主往返于自动充电桩与任一指定室内位置,保障不间断盘点工作。
